This project focused on managing tolerances, avoiding collisions, and controlling vibrations.
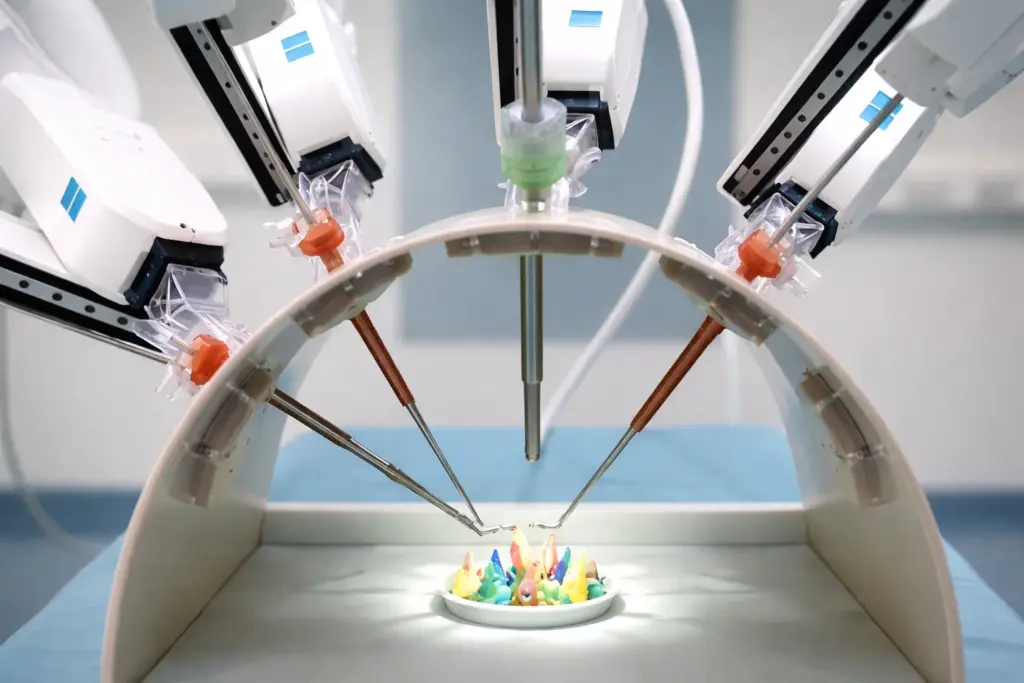
Asimov is a robot-assisted system for minimally invasive procedures. Compact design, four arms, 5-mm instruments, for tight spaces. It’s not enough for a prototype to work well. The production series must do so as well. That was our job.
- 3D tolerance analysis of all joints of the telemanipulator.
- Geometric optimization for robust series production.
- Vibration analysis under realistic surgical scenarios all the way to the instrument tip.
We examined the telemanipulator’s joint drives along complete tolerance chains. Where does play accumulate? Where do dimensions tip in a critical direction? Where do collisions arise solely from the sum of small deviations?
Using 3D tolerance analyses of all joints, we were able to identify critical overlaps. We then adjusted the geometries, which reduced the play. We resolved collision areas and eliminated tolerance-related contacts through design changes before they could occur during manufacturing or in the operating room. This reduces the need for rework, stabilizes the assembly process, and ensures that the system performs consistently from device to device.
The second focus was on vibration behavior. We investigated how external influences, such as a change of instrument, induce vibrations in the system, how these vibrations are transmitted between robotic arms, and what reaches the tip of the instrument. Measurements were taken using high-precision optical 3D measurement technology. We compared free arms with realistic scenarios involving an instrument in the body model. Amplitude, frequency, and damping were critical factors. The robot simply needs to remain stable.
The analysis revealed where potential risk factors for unintended instrument movements lie. We derived corresponding optimization measures from these findings. Thus, observation led to robust development work. Collisions in CAD are still acceptable. In the OR, they are not.
Robustness in series production does not end at the individual joint; it affects the supporting structure, the center of gravity, the interface between the instrument and the robot, and subsequent industrialization as well. Those who consider these elements separately often end up with a clean drawing and a cumbersome assembly.
The benefit? Less play. Less risk of collision. Controlled vibrations.
A system that moves precisely and can be manufactured, assembled, and validated in a reproducible manner. From our perspective, it’s clear that anyone who wants to bring robotics into series production needs robust tolerance chains, clean interfaces, and data from realistic scenarios.
“We make robotic systems robust enough for mass production. To do this, we define tolerances, eliminate tolerance-related collisions, and analyze vibrations all the way down to the instrument tip. We’d rather spot collisions in CAD than later during assembly.”
Martin Fischbach, Head of Medical Technology