In diesem Projekt ging es darum, Toleranzen zu beherrschen, Kollisionen zu vermeiden und Schwingungen in den Griff zu bekommen.
Asimov ist ein robotisch-assistiertes System für minimalinvasive Eingriffe. Kompakt aufgebaut, vier Arme, 5‑mm‑Instrumente, für enge Bauräume. Da reicht es nicht, dass ein Prototyp gut läuft. Die Serie muss es auch tun. Das war unser Job.
- 3D-Toleranzanalyse aller Gelenke des Telemanipulators.
- Geometrieoptimierung für robuste Serienfertigung.
- Schwingungsanalyse unter realitätsnahen OP-Szenarien bis zur Instrumentenspitze.
Wir haben die Gelenkantriebe des Telemanipulators entlang kompletter Toleranzketten untersucht. Wo addiert sich Spiel? Wo kippen Maße in eine kritische Richtung? Wo entstehen Kollisionen erst durch die Summe kleiner Abweichungen?
Mit 3D-Toleranzanalysen aller Gelenke konnten wir kritische Überlagerungen sichtbar machen. Danach haben wir die Geometrien angepasst. Dadurch wurde das Spiel reduziert. Kollisionsräume wurden bereinigt und toleranzbedingte Kontakte haben wir konstruktiv eliminiert, bevor sie in der Fertigung oder im OP auftauchen. Das spart Nacharbeit. Es stabilisiert die Montage, und es sorgt dafür, dass sich das System von Gerät zu Gerät gleich verhält.
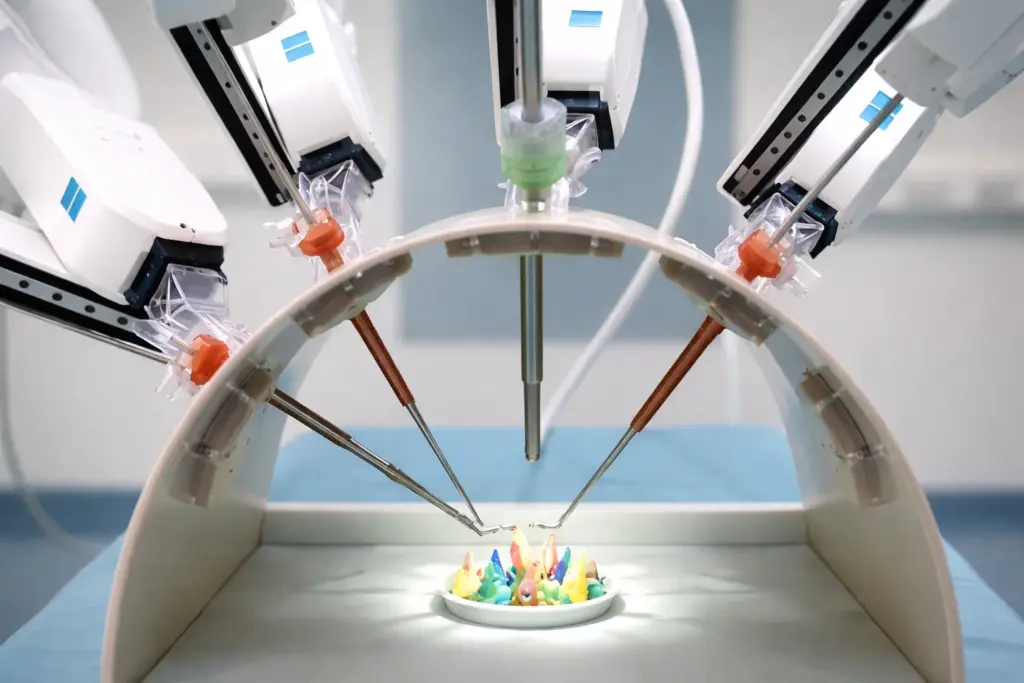
Der zweite Schwerpunkt war das Schwingungsverhalten. Wir haben untersucht, wie äußere Einflüsse wie ein Instrumentenwechsel Schwingungen im System anregen, wie sie sich zwischen Roboterarmen übertragen und was davon an der Instrumentenspitze ankommt. Gemessen wurde mit hochgenauer optischer 3D-Messtechnik. Verglichen wurden freie Arme und realitätsnahe Szenarien mit Instrument im Körpermodell. Entscheidend waren Amplitude, Frequenz und Dämpfung. Der Roboter soll einfach ruhig bleiben.
Die Analyse hat gezeigt, wo potenzielle Risikofaktoren für unbeabsichtigte Instrumentenbewegungen liegen. Aus diesen Erkenntnissen haben wir entsprechende Optimierungsmaßnahmen abgeleitet. So wurde aus Beobachtung belastbare Entwicklungsarbeit. Kollisionen im CAD sind noch günstig. Im OP eher nicht.
Serienrobustheit endet dabei nicht am einzelnen Gelenk, sie betrifft die tragende Struktur, den Schwerpunkt, die Schnittstelle zwischen Instrument und Roboter und die spätere Industrialisierung gleich mit. Wer diese Dinge getrennt betrachtet, bekommt am Ende oft eine saubere Zeichnung und eine zähe Montage.
Der Nutzen? Weniger Spiel. Weniger Kollisionsrisiko. Beherrschte Schwingungen.
Ein System, das sich präzise bewegt und zugleich reproduzierbar fertigen, montieren und validieren lässt. Aus unserer Sicht lässt sich sagen, wer Robotik in Serie bringen will, braucht belastbare Toleranzketten, saubere Schnittstellen und Daten aus realistischen Szenarien.
„Wir machen robotische Systeme serienrobust. Dafür klären wir Toleranzen, eliminieren toleranzbedingte Kollisionen und analysieren Schwingungen bis zur Instrumentenspitze. Kollisionen sehen wir lieber im CAD als später in der Montage.“
Martin Fischbach, Bereichsleiter Medizintechnik